Inclusão de mais um pino de I/O para a PCI Chipkit Max32.
Olá pessoal, neste post estarei indicando como adicionar mais um pino de I/O para o Chipkit Max32.
Após estudar o esquema elétrico da placa e o datasheet do microcontrolador, me deparei com um pino que não estava sendo utilizado.
Claro, para este kit já existe uma quantidade enorme de pinos para serem utilizados, e muitos dos quais já estão compatibilizados com as bibliotecas existentes para a IDE do Arduino. Ficando a opção de incluir este novo pino para soluções onde os demais ports já estariam sendo totalmente utilizados.
A seguir imagens do port em questão no datasheet:
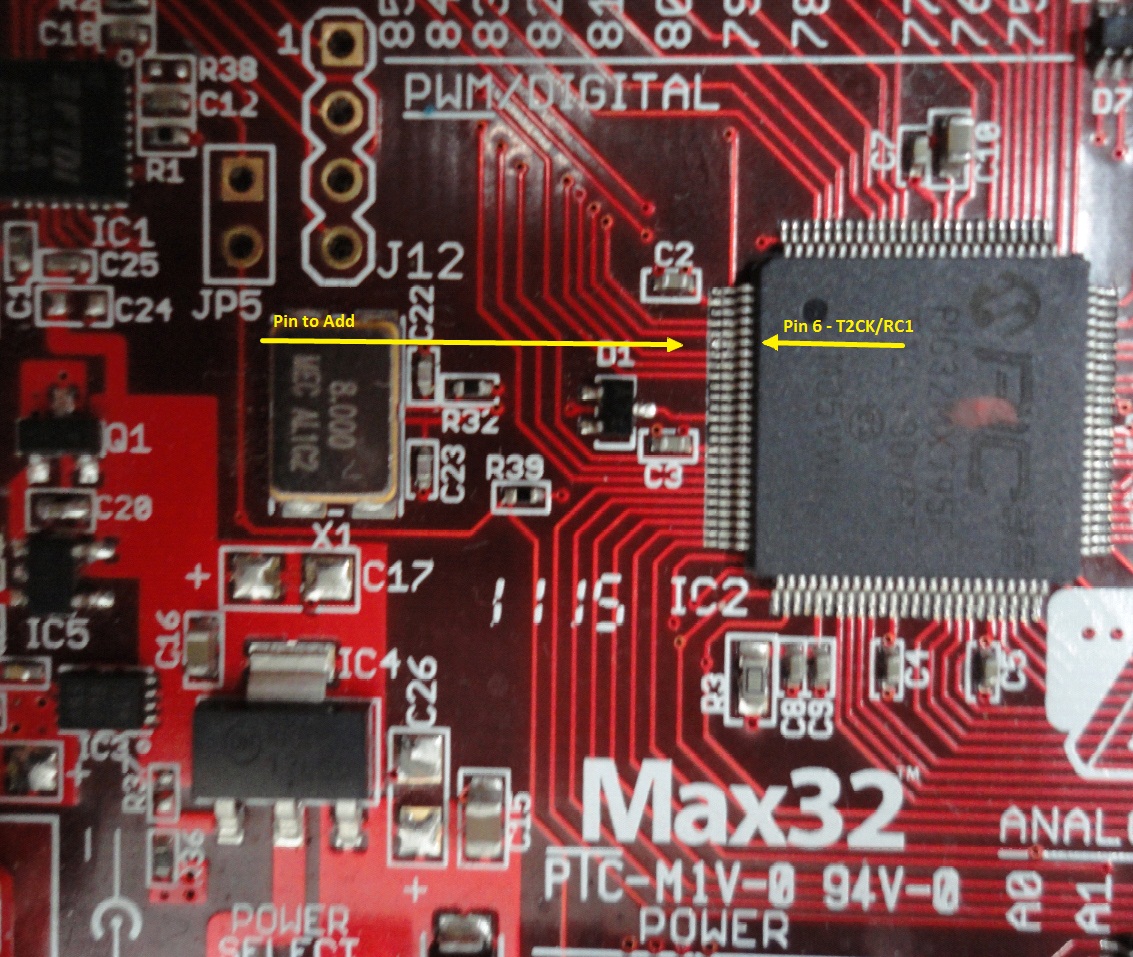
Imagens do port no microcontrolador:
1º) Deve- se alterar os seguintes arquivos existentes no diretório do MPIDE:
1.1) Adicione as seguintes configurações para o 86º pino.
..\hardware\pic32\variants\Max32\Board_Data.c
-> const uint8_t digital_pin_to_port_PGM[];
linha para adicionar : _IOPORT_PC, // 86 RC1 T2CK/RC1
-> const uint16_t digital_pin_to_bit_mask_PGM[];
linha para adicionar : _BV( 1 ), // 86 RC1 T2CK/RC1
-> const uint16_t digital_pin_to_timer_PGM[];
linha para adicionar : NOT_ON_TIMER, // 86 RC1 T2CK/RC1
1.2) Ou substitua as tabelas por estas já com as linhas inclusas.:
/* ------------------------------------------------------------ */
/* This table is used to map the digital pin number to the port
** containing that pin.
*/
const uint8_t digital_pin_to_port_PGM[] = {
_IOPORT_PF, // 0 RF2 SDA1A/SDI1A/U1ARX/RF2
_IOPORT_PF, // 1 RF8 SCL1A/SDO1A/U1ATX/RF8
_IOPORT_PE, // 2 RE8 AERXD0/INT1/RE8
_IOPORT_PD, // 3 RD0 SDO1/OC1/INT0/RD0
_IOPORT_PC, // 4 RC14 SOSCO/T1CK/CN0/RC14
_IOPORT_PD, // 5 RD1 OC2/RD1
_IOPORT_PD, // 6 RD2 OC3/RD2
_IOPORT_PE, // 7 RE9 AERXD1/INT2/RE9
_IOPORT_PD, // 8 RD12 ETXD2/IC5/PMD12/RD12
_IOPORT_PD, // 9 RD3 OC4/RD3
_IOPORT_PD, // 10 RD4 OC5/PMWR/CN13/RD4
_IOPORT_PC, // 11 RC4 T5CK/SDI1/RC4
_IOPORT_PA, // 12 RA2 SCL2/RA2
_IOPORT_PA, // 13 RA3 SDA2/RA3
_IOPORT_PF, // 14 RF13 AC1TX/SCK3A/U3BTX/U3ARTS/RF13
_IOPORT_PF, // 15 RF12 AC1RX/SS3A/U3BRX/U3ACTS/RF12
_IOPORT_PF, // 16 RF5 SCL3A/SDO3A/U3ATX/PMA8/CN18/RF5
_IOPORT_PF, // 17 RF4 SDA3A/SDI3A/U3ARX/PMA9/CN17/RF4
_IOPORT_PD, // 18 RD15 AETXD1/SCK1A/U1BTX/U1ARTS/CN21/RD15
_IOPORT_PD, // 19 RD14 AETXD0/SS1A/U1BRX/U1ACTS/CN20/RD14
_IOPORT_PA, // 20 RA15 AETXEN/SDA1/INT4/RA15
_IOPORT_PA, // 21 RA14 AETXCLK/SCL1/INT3/RA14
_IOPORT_PC, // 22 RC2 T3CK/AC2TX/RC2
_IOPORT_PC, // 23 RC3 T4CK/AC2RX/RC3
_IOPORT_PC, // 24 VBUS
_IOPORT_PF, // 25 RF3 USBID/RF3
_IOPORT_PG, // 26 RG3 D-/RG3
_IOPORT_PG, // 27 RG2 D+/RG2
_IOPORT_PG, // 28 RG15
_IOPORT_PG, // 29 RG7 ECRS/SDA2A/SDI2A/U2ARX/PMA4/CN9/RG7
_IOPORT_PE, // 30 RE7 PMD7/RE7
_IOPORT_PE, // 31 RE6 PMD6/RE6
_IOPORT_PE, // 32 RE5 PMD5/RE5
_IOPORT_PE, // 33 RE4 PMD4/RE4
_IOPORT_PE, // 34 RE3 PMD3/RE3
_IOPORT_PE, // 35 RE2 PMD2/RE2
_IOPORT_PE, // 36 RE1 PMD1/RE1
_IOPORT_PE, // 37 RE0 PMD0/RE0
_IOPORT_PD, // 38 RD10 SCK1/IC3/PMCS2/PMA15/RD10
_IOPORT_PD, // 39 RD5 PMRD/CN14/RD5
_IOPORT_PB, // 40 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
_IOPORT_PB, // 41 RB13 AN13/ERXD1/AECOL/PMA10/RB13
_IOPORT_PB, // 42 RB12 AN12/ERXD0/AECRS/PMA11/RB12
_IOPORT_PG, // 43 RG8 ERXDV/AERXDV/ECRSDV/AECRSDV/SCL2A/SDO2A/U2ATX/PMA3/CN10/RG8
_IOPORT_PA, // 44 RA10 VREF+/CVREF+/AERXD3/PMA6/RA10
_IOPORT_PF, // 45 RF0 C1RX/ETXD1/PMD11/RF0
_IOPORT_PF, // 46 RF1 C1TX/ETXD0/RMD10/RF1
_IOPORT_PD, // 47 RD6 ETXEN/PMD14/CN15/RD6
_IOPORT_PD, // 48 RD8 PTCC/EMDIO/AEMDIO/IC1/RD8
_IOPORT_PD, // 49 RD11 EMDC/AEMDC/IC4/PMCS1/PMA14/RD11
_IOPORT_PG, // 50 RG7 ECRS/SDA2/SDI2A/U2ARX/PMA4/CN9/RG7
_IOPORT_PG, // 51 RG8
_IOPORT_PG, // 52 RG6 ECOL/SCK2A/U2BTX/U2ARTS/PMA5/CN8/RG6
_IOPORT_PG, // 53 RG9 ERXCLK/AERXCLK/EREFCLK/AEREFCLK/SS2A/U2BRX/U2ACTS/PMA2/CN11/RG9
//* the analog ports start with 54
_IOPORT_PB, // 54 RB0 PGED1/AN0/CN2/RB0
_IOPORT_PB, // 55 RB1 PGEC1/AN1/CN3/RB1
_IOPORT_PB, // 56 RB2 AN2/C2IN-/CN4/RB2
_IOPORT_PB, // 57 RB3 AN3/C2IN+/CN5/RB3
_IOPORT_PB, // 58 RB4 AN4/C1IN-/CN6/RB4
_IOPORT_PB, // 59 RB5 AN5/C1IN+/VBUSON/CN7/RB5
_IOPORT_PB, // 60 RB6 PGEC2/AN6/OCFA/RB6
_IOPORT_PB, // 61 RB7 PGED2/AN7/RB7
_IOPORT_PB, // 62 RB8 AN8/C1OUT/RB8
_IOPORT_PB, // 63 RB9 AN9/C2OUT/RB9
_IOPORT_PB, // 64 RB10 AN10/CVREFOUT/PMA13/RB10
_IOPORT_PB, // 65 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
_IOPORT_PB, // 66 RB12 AN13/ERXD1/AECOL/PMA10/RB13
_IOPORT_PB, // 67 RB13 AN12/ERXD0/AECRS/PMA11/RB12
_IOPORT_PB, // 68 RB14 AN14/ERXD2/AETXD3/PMALH/PMA1/RB14
_IOPORT_PB, // 69 RB15 AN15/ERXD3/AETXD2/OCFB/PMALL/PMA0/CN12/RB15
//* Pic32 EXTRAS start here (with #70)
_IOPORT_PA, // 70 RA0 TMS/RA0
_IOPORT_PA, // 71 RA1 TCK/RA1
_IOPORT_PA, // 72 RA4 TDI/RA4
_IOPORT_PA, // 73 RA5 TDO/RA5
_IOPORT_PD, // 74 RD9 SS1/IC2/RD9
_IOPORT_PC, // 75 RC13 SOSCI/CN1/RC13
_IOPORT_PD, // 76 RD13 ETXD3/PMD13/CN19/RD13
_IOPORT_PD, // 77 RD7 ETXCLK/PMD15/CN16/RD7
_IOPORT_PG, // 78 RG1 C2TX/ETXERR/PMD9/RG1
_IOPORT_PG, // 79 RG0 C2RX/PMD8/RG0
_IOPORT_PA, // 80 RA6 TRCLK/RA6
_IOPORT_PA, // 81 RA7 TRD3/RA7
_IOPORT_PG, // 82 RG14 TRD2/RG14
_IOPORT_PG, // 83 RG12 TRD1/RG12
_IOPORT_PG, // 84 RG13 TRD0/RG13
_IOPORT_PA, // 85 RA9 VREF-/CVREF0/AERXD2/PMA7/RA9
_IOPORT_PC, // 86 RC1 T2CK/RC1
};
/* ------------------------------------------------------------ */
/* This table is used to map from digital pin number to a bit mask
** for the corresponding bit within the port.
*/
const uint16_t digital_pin_to_bit_mask_PGM[] = {
_BV( 2 ), // 0 RF2 SDA1A/SDI1A/U1ARX/RF2
_BV( 8 ), // 1 RF8 SCL1A/SDO1A/U1ATX/RF8
_BV( 8 ), // 2 RE8 AERXD0/INT1/RE8
_BV( 0 ), // 3 RD0 SDO1/OC1/INT0/RD0
_BV( 14 ), // 4 RC14 SOSCO/T1CK/CN0/RC14
_BV( 1 ), // 5 RD1 OC2/RD1
_BV( 2 ), // 6 RD2 OC3/RD2
_BV( 9 ), // 7 RE9 AERXD1/INT2/RE9
_BV( 12 ), // 8 RD12 ETXD2/IC5/PMD12/RD12
_BV( 3 ), // 9 RD3 OC4/RD3
_BV( 4 ), // 10 RD4 OC5/PMWR/CN13/RD4
_BV( 4 ), // 11 RC4 T5CK/SDI1/RC4
_BV( 2 ), // 12 RA2 SCL2/RA2
_BV( 3 ), // 13 RA3 SDA2/RA3
_BV( 13 ), // 14 RF13 AC1TX/SCK3A/U3BTX/U3ARTS/RF13
_BV( 12 ), // 15 RF12 AC1RX/SS3A/U3BRX/U3ACTS/RF12
_BV( 5 ), // 16 RF5 SCL3A/SDO3A/U3ATX/PMA8/CN18/RF5
_BV( 4 ), // 17 RF4 SDA3A/SDI3A/U3ARX/PMA9/CN17/RF4
_BV( 15 ), // 18 RD15 AETXD1/SCK1A/U1BTX/U1ARTS/CN21/RD15
_BV( 14 ), // 19 RD14 AETXD0/SS1A/U1BRX/U1ACTS/CN20/RD14
_BV( 15 ), // 20 RA15 AETXEN/SDA1/INT4/RA15
_BV( 14 ), // 21 RA14 AETXCLK/SCL1/INT3/RA14
_BV( 2 ), // 22 RC2 T3CK/AC2TX/RC2
_BV( 3 ), // 23 RC3 T4CK/AC2RX/RC3
_BV( 0 ), // 24 VBUS
_BV( 3 ), // 25 RF3 USBID/RF3
_BV( 3 ), // 26 RG3 D-/RG3
_BV( 2 ), // 27 RG2 D+/RG2
_BV( 15 ), // 28 RG15
_BV( 7 ), // 29 RG7 ECRS/SDA2A/SDI2A/U2ARX/PMA4/CN9/RG7
_BV( 7 ), // 30 RE7 PMD7/RE7
_BV( 6 ), // 31 RE6 PMD6/RE6
_BV( 5 ), // 32 RE5 PMD5/RE5
_BV( 4 ), // 33 RE4 PMD4/RE4
_BV( 3 ), // 34 RE3 PMD3/RE3
_BV( 2 ), // 35 RE2 PMD2/RE2
_BV( 1 ), // 36 RE1 PMD1/RE1
_BV( 0 ), // 37 RE0 PMD0/RE0
_BV( 10 ), // 38 RD10 SCK1/IC3/PMCS2/PMA15/RD10
_BV( 5 ), // 39 RD5 PMRD/CN14/RD5
_BV( 11 ), // 40 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
_BV( 13 ), // 41 RB13 AN13/ERXD1/AECOL/PMA10/RB13
_BV( 12 ), // 42 RB12 AN12/ERXD0/AECRS/PMA11/RB12
_BV( 8 ), // 43 RG8 ERXDV/AERXDV/ECRSDV/AECRSDV/SCL2A/SDO2A/U2ATX/PMA3/CN10/RG8
_BV( 10 ), // 44 RA10 VREF+/CVREF+/AERXD3/PMA6/RA10
_BV( 0 ), // 45 RF0 C1RX/ETXD1/PMD11/RF0
_BV( 1 ), // 46 RF1 C1TX/ETXD0/RMD10/RF1
_BV( 6 ), // 47 RD6 ETXEN/PMD14/CN15/RD6
_BV( 8 ), // 48 RD8 RTCC/EMDIO/AEMDIO/IC1/RD8
_BV( 11 ), // 49 RD11 EMDC/AEMDC/IC4/PMCS1/PMA14/RD11
_BV( 7 ), // 50 RG7 ECRX/SDA2/SDI2A/U2ARX/PMA4/CN9/RG7
_BV( 8 ), // 51 RG8
_BV( 6 ), // 52 RG6 ECOL/SCK2A/U2BTX/U2ARTS/PMA5/CN8/RG6
_BV( 9 ), // 53 RG9 ERXCLK/AERXCLK/EREFCLK/AEREFCLK/SS2A/U2BRX/U2ACTS/PMA2/CN11/RG9
//* the analog ports start with 54
_BV( 0 ), // 54 RB0 PGED1/AN0/CN2/RB0
_BV( 1 ), // 55 RB1 PGEC1/AN1/CN3/RB1
_BV( 2 ), // 56 RB2 AN2/C2IN-/CN4/RB2
_BV( 3 ), // 57 RB3 AN3/C2IN+/CN5/RB3
_BV( 4 ), // 58 RB4 AN4/C1IN-/CN6/RB4
_BV( 5 ), // 59 RB5 AN5/C1IN+/VBUSON/CN7/RB5
_BV( 6 ), // 60 RB6 PGEC2/AN6/OCFA/RB6
_BV( 7 ), // 61 RB7 PGED2/AN7/RB7
_BV( 8 ), // 62 RB8 AN8/C1OUT/RB8
_BV( 9 ), // 63 RB9 AN9/C2OUT/RB9
_BV( 10 ), // 64 RB10 AN10/CVREFOUT/PMA13/RB10
_BV( 11 ), // 65 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
_BV( 12 ), // 66 RB12 AN13/ERXD1/AECOL/PMA10/RB13
_BV( 13 ), // 67 RB13 AN12/ERXD0/AECRS/PMA11/RB12
_BV( 14 ), // 68 RB14 AN14/ERXD2/AETXD3/PMALH/PMA1/RB14
_BV( 15 ), // 69 RB15 AN15/ERXD3/AETXD2/OCFB/PMALL/PMA0/CN12/RB15
//* Pic32 EXTRAS start here (with #70)
//* Pic32 EXTRAS start here (with #70)
_BV( 0 ), // 70 RA0 TMS/RA0
_BV( 1 ), // 71 RA1 TCK/RA1
_BV( 4 ), // 72 RA4 TDI/RA4
_BV( 5 ), // 73 RA5 TDO/RA5
_BV( 9 ), // 74 RD9 SS1/IC2/RD9
_BV( 13 ), // 75 RC13 SOSCI/CN1/RC13
_BV( 13 ), // 76 RD13 ETXD3/PMD13/CN19/RD13
_BV( 7 ), // 77 RD7 ETXCLK/PMD15/CN16/RD7
_BV( 1 ), // 78 RG1 C2TX/ETXERR/PMD9/RG1
_BV( 0 ), // 79 RG0 C2RX/PMD8/RG0
_BV( 6 ), // 80 RA6 TRCLK/RA6
_BV( 7 ), // 81 RA7 TRD3/RA7
_BV( 14 ), // 82 RG14 TRD2/RG14
_BV( 12 ), // 83 RG12 TRD1/RG12
_BV( 13 ), // 84 RG13 TRD0/RG13
_BV( 9 ), // 85 RA9 VREF-/CVREF0/AERXD2/PMA7/RA9
_BV( 1 ), // 86 RC1 T2CK/RC1
};
/* ------------------------------------------------------------ */
/* This table is used to map from digital pin number to the output
** compare number, input capture number, and timer external clock
** input associated with that pin.
*/
const uint16_t digital_pin_to_timer_PGM[] = {
NOT_ON_TIMER, // 0 RF2 SDA1A/SDI1A/U1ARX/RF2
NOT_ON_TIMER, // 1 RF8 SCL1A/SDO1A/U1ATX/RF8
NOT_ON_TIMER, // 2 RE8 AERXD0/INT1/RE8
_TIMER_OC1, // 3 RD0 SDO1/OC1/INT0/RD0
_TIMER_TCK1, // 4 RC14 SOSCO/T1CK/CN0/RC14
_TIMER_OC2, // 5 RD1 OC2/RD1
_TIMER_OC3, // 6 RD2 OC3/RD2
NOT_ON_TIMER, // 7 RE9 AERXD1/INT2/RE9
_TIMER_IC5, // 8 RD12 ETXD2/IC5/PMD12/RD12
_TIMER_OC4, // 9 RD3 OC4/RD3
_TIMER_OC5, // 10 RD4 OC5/PMWR/CN13/RD4
_TIMER_TCK5, // 11 RC4 T5CK/SDI1/RC4
NOT_ON_TIMER, // 12 RA2 SCL2/RA2
NOT_ON_TIMER, // 13 RA3 SDA2/RA3
NOT_ON_TIMER, // 14 RF13 AC1TX/SCK3A/U3BTX/U3ARTS/RF13
NOT_ON_TIMER, // 15 RF12 AC1RX/SS3A/U3BRX/U3ACTS/RF12
NOT_ON_TIMER, // 16 RF5 SCL3A/SDO3A/U3ATX/PMA8/CN18/RF5
NOT_ON_TIMER, // 17 RF4 SDA3A/SDI3A/U3ARX/PMA9/CN17/RF4
NOT_ON_TIMER, // 18 RD15 AETXD1/SCK1A/U1BTX/U1ARTS/CN21/RD15
NOT_ON_TIMER, // 19 RD14 AETXD0/SS1A/U1BRX/U1ACTS/CN20/RD14
NOT_ON_TIMER, // 20 RA15 AETXEN/SDA1/INT4/RA15
NOT_ON_TIMER, // 21 RA14 AETXCLK/SCL1/INT3/RA14
_TIMER_TCK3, // 22 RC2 T3CK/AC2TX/RC2
_TIMER_TCK4, // 23 RC3 T4CK/AC2RX/RC3
NOT_ON_TIMER, // 24 VBUS
NOT_ON_TIMER, // 25 RF3 USBID/RF3
NOT_ON_TIMER, // 26 RG3 D-/RG3
NOT_ON_TIMER, // 27 RG2 D+/RG2
NOT_ON_TIMER, // 28 RG15
NOT_ON_TIMER, // 29 RG7 ECRS/SDA2A/SDI2A/U2ARX/PMA4/CN9/RG7
NOT_ON_TIMER, // 30 RE7 PMD7/RE7
NOT_ON_TIMER, // 31 RE6 PMD6/RE6
NOT_ON_TIMER, // 32 RE5 PMD5/RE5
NOT_ON_TIMER, // 33 RE4 PMD4/RE4
NOT_ON_TIMER, // 34 RE3 PMD3/RE3
NOT_ON_TIMER, // 35 RE2 PMD2/RE2
NOT_ON_TIMER, // 36 RE1 PMD1/RE1
NOT_ON_TIMER, // 37 RE0 PMD0/RE0
_TIMER_IC3, // 38 RD10 SCK1/IC3/PMCS2/PMA15/RD10
NOT_ON_TIMER, // 39 RD5 PMRD/CN14/RD5
NOT_ON_TIMER, // 40 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
NOT_ON_TIMER, // 41 RB13 AN13/ERXD1/AECOL/PMA10/RB13
NOT_ON_TIMER, // 42 RB12 AN12/ERXD0/AECRS/PMA11/RB12
NOT_ON_TIMER, // 43 RG8 ERXDV/AERXDV/ECRSDV/AECRSDV/SCL2A/SDO2A/U2ATX/PMA3/CN10/RG8
NOT_ON_TIMER, // 44 RA10 VREF+/CVREF+/AERXD3/PMA6/RA10
NOT_ON_TIMER, // 45 RF0 C1RX/ETXD1/PMD11/RF0
NOT_ON_TIMER, // 46 RF1 C1TX/ETXD0/RMD10/RF1
NOT_ON_TIMER, // 47 RD6 ETXEN/PMD14/CN15/RD6
_TIMER_IC1, // 48 RD8 PTCC/EMDIO/AEMDIO/IC1/RD8
_TIMER_IC4, // 49 RD11 EMDC/AEMDC/IC4/PMCS1/PMA14/RD11
NOT_ON_TIMER, // 50 RG7 ECRX/SDA2/SDI2A/U2ARX/PMA4/CN9/RG7
NOT_ON_TIMER, // 51 RG8
NOT_ON_TIMER, // 52 RG6 ECOL/SCK2A/U2BTX/U2ARTS/PMA5/CN8/RG6
NOT_ON_TIMER, // 53 RG9 ERXCLK/AERXCLK/EREFCLK/AEREFCLK/SS2A/U2BRX/U2ACTS/PMA2/CN11/RG9
//* the analog ports start with 54
NOT_ON_TIMER, // 54 RB0 PGED1/AN0/CN2/RB0
NOT_ON_TIMER, // 55 RB1 PGEC1/AN1/CN3/RB1
NOT_ON_TIMER, // 56 RB2 AN2/C2IN-/CN4/RB2
NOT_ON_TIMER, // 57 RB3 AN3/C2IN+/CN5/RB3
NOT_ON_TIMER, // 58 RB4 AN4/C1IN-/CN6/RB4
NOT_ON_TIMER, // 59 RB5 AN5/C1IN+/VBUSON/CN7/RB5
NOT_ON_TIMER, // 60 RB6 PGEC2/AN6/OCFA/RB6
NOT_ON_TIMER, // 61 RB7 PGED2/AN7/RB7
NOT_ON_TIMER, // 62 RB8 AN8/C1OUT/RB8
NOT_ON_TIMER, // 63 RB9 AN9/C2OUT/RB9
NOT_ON_TIMER, // 64 RB10 AN10/CVREFOUT/PMA13/RB10
NOT_ON_TIMER, // 65 RB11 AN11/EREXERR/AETXERR/PMA12/RB11
NOT_ON_TIMER, // 66 RB12 AN13/ERXD1/AECOL/PMA10/RB13
NOT_ON_TIMER, // 67 RB13 AN12/ERXD0/AECRS/PMA11/RB12
NOT_ON_TIMER, // 68 RB14 AN14/ERXD2/AETXD3/PMALH/PMA1/RB14
NOT_ON_TIMER, // 69 RB15 AN15/ERXD3/AETXD2/OCFB/PMALL/PMA0/CN12/RB15
//* Pic32 EXTRAS start here (with #70)
NOT_ON_TIMER, // 70 RA0 TMS/RA0
NOT_ON_TIMER, // 71 RA1 TCK/RA1
NOT_ON_TIMER, // 72 RA4 TDI/RA4
NOT_ON_TIMER, // 73 RA5 TDO/RA5
_TIMER_IC2, // 74 RD9 SS1/IC2/RD9
NOT_ON_TIMER, // 75 RC13 SOSCI/CN1/RC13
NOT_ON_TIMER, // 76 RD13 ETXD3/PMD13/CN19/RD13
NOT_ON_TIMER, // 77 RD7 ETXCLK/PMD15/CN16/RD7
NOT_ON_TIMER, // 78 RG1 C2TX/ETXERR/PMD9/RG1
NOT_ON_TIMER, // 79 RG0 C2RX/PMD8/RG0
NOT_ON_TIMER, // 80 RA6 TRCLK/RA6
NOT_ON_TIMER, // 81 RA7 TRD3/RA7
NOT_ON_TIMER, // 82 RG14 TRD2/RG14
NOT_ON_TIMER, // 83 RG12 TRD1/RG12
NOT_ON_TIMER, // 84 RG13 TRD0/RG13
NOT_ON_TIMER, // 85 RA9 VREF-/CVREF0/AERXD2/PMA7/RA9
NOT_ON_TIMER, // 86 RC1 T2CK/RC1
};
2)Altere o próximo arquivo.
..\hardware\pic32\variants\Max32\Board_Defs.h
Altere o seguinte define:
#define NUM_DIGITAL_PINS 87
3.1) Altere o próximo arquivo.
..\hardware\pic32\libraries\Firmata\Boards.h
Altere o seguinte define para o (_BOARD_MEGA_):
#define TOTAL_PINS 86
3.2) Ou substitua os seguintes defines:
#elif defined(_BOARD_MEGA_)
#define TOTAL_ANALOG_PINS 16
#define TOTAL_PINS 86 // 69 digital + 16 analog
#define VERSION_BLINK_PIN 13
#define IS_PIN_DIGITAL(p) (((p) >= 2 && (p) <= 23) || ((p) >= 28 && (p) <= 39) || ((p) >= 43 && (p) <= 84))
#define IS_PIN_ANALOG(p) ((p) >= 54 && (p) <= 69)
#define IS_PIN_PWM(p) IS_PIN_DIGITAL(p)
#define IS_PIN_SERVO(p) (((p) >= 2 && (p) <= 23 && (p) - 2 < MAX_SERVOS) || (((p) >= 28 && (p) <= 29 && (p) - 6 < MAX_SERVOS)))
#define IS_PIN_I2C(p) (0)
#define PIN_TO_DIGITAL(p) (p)
#define PIN_TO_ANALOG(p) ((p)-54)
#define PIN_TO_PWM(p) PIN_TO_DIGITAL(p)
#define PIN_TO_SERVO(p) (p)<=23 ? (p)-2 : (p)-6
4) Programa de teste: a cada 50mseg este pino irá mudar de estado.
/* Blink 86º pin */
int ledState = LOW;
void setup() {
// set the digital pin as output
pinMode(86, OUTPUT);
}
void loop()
{
if (ledState == LOW){
ledState = HIGH;
}else{
ledState = LOW;
}
// set the LED with the ledState of the variable
digitalWrite(86, ledState);
delay(50);
}
Qualquer dúvida, não deixem de comentar.
Até o próximo post.